Today’s robot joints have highly integrated motors, encoders, gearing solutions, and sometimes brakes. It is common to use a direct drive frameless torque motor kit coupled to a precision high ratio gear system. While these two terms “direct drive” and “precision gear” tend to conflict, the combination is successful in optimizing for size and performance.
The five tips below focus on how to select a direct drive frameless torque motor kit and provide system engineering requirements for the drive motor selection.
1. SYSTEM ARCHITECTURE
Selection of control methods, feedback requirements, and mechanical attributes really drive the selection of the motor.
a. The most common motorized joint includes a brushless permanent magnet frameless torque motor kit, an absolute encoder kit, and a high ratio zero backlash gear.
b. In most cases, a high precision absolute encoder is also required on the output of the gear to handle any lost motion and wind-up due to the low stiffness and lost motion in the gear systems.
c. System voltage levels tend to be in the low voltage range < 50volts. This drives low impedance motor characteristics and defines the input speed range. d. Field oriented control sinusoidal servo drives with proper safety functionality and serial communication interfaces, such as EtherCat, are being used. Drives are getting smaller and located closer to the motor. e. Force and torque sensors may be necessary if the robot is used in a collaborative environment.
f. If the robot needs to hold a pose, fail-safe power-off brakes may be required.
2. MOTOR SELECTION
The most important attributes in a frameless motor kit are mechanical form factor, motor constant (Km), and torque vs. speed characteristics when operating within the power limits. Do your homework, know what motor constant, Km, you need.
a. There are no standards in the industry regarding motor form factor, i.e. Diameter, Length and through hole size.
b. Motor Constant, Km, is the only true indicator of a motor’s ability to output torque under thermal constraints. Km is a calculation = Kt/sqrt(R), where Kt is the torque constant NM/Amp, and R is the resistance in Ohms. Take care in making sure units are consistent and always calculate this because datasheets are notoriously lacking.
c. Cogging torque can greatly impact smoothness of operation. Cogging torque is not normally shown in a motor datasheet. The absolute value and the frequency of this cogging torque is important to the dynamics. Less is always better in this case, zero is preferred.
d. Sinusoidal torque versus angle curves and phase balance are critical to smooth motion. These two items are not shown in datasheets. It is only through experience and testing a problem will be uncovered. Ask for this data from the supplier.
e. Thermal resistance and thermal time constant are also important to know. Again, not always provided in a datasheet, and often assume unrealistic test conditions. Some robots have very specific temperature requirements almost disconnected from how motors are typically rated.
f. Electrical time constant is usually overlooked during selection. However, servo system response and servo driver PWM frequency play a large role in system performance. A low inductance motor, (typically a result of smaller size, zero cogging, weight optimized, low voltage motor kits), requires higher driver PWM frequency to minimize current ripple. Current ripple can cause electrical noise as well as additional heating.
3. MOTOR INTEGRATION
Integrating a frameless motor kit into a mechanical joint is a complex mechanical design, with rotating mechanics, dynamics, and thermal considerations.
a. Joint size reduction is achieved by a high level of mechanical integration. Simplifying the number of bearings, eliminating couplings, and sharing rotating shafts and housings. This is the best way to improve reliability and reduce components.
b. Direct drive brushless frameless torque motors provide the highest Km, and therefore the highest torque output within the thermal budget. Torque requirements are not always known, if in doubt, look for the highest Km motor you can find for the available space. Supplier ratings for continuous torque are for reference only due to thermal conditions. A high Km motor will allow flexibility in electrical, mechanical and thermal attributes.
c. Motor Km increases with diameter faster than it increases with axial length. Always select the largest diameter frameless motor kit available with the shortest length to achieve the Km required.
d. Large diameter, high Km motors also typically have a large through hole. This through hole can be used for mechanical integration with bearings, or it can be used to house a holding brake coaxial to the motor. This will reduce the axial length of the joint.
e. Radial and axial magnetic forces are present in all motors. Again, not shown in datasheets, so you need to ask the supplier.
f. Cogging torque is undesired in all cases for a robot joint. Find the lowest cogging or zero cogging and it will eliminate much of the down stream diagnostic and vibration issues. Cogging frequency is also very important, a high frequency is generally better than a lower frequency and can be more easily tuned out. You will need to ask for this data.
4. TEMPERATURE AND THERMAL LIMITS
a. The thermal resistance of a motor when mounting into a robot joint is unknown. This means that whatever the datasheet says for torque output isn’t really relevant to the robot joint. Getting the highest Km in the size available will allow the most flexibility.
b. If a power off brake (mostly the case for safety reasons) is required and integrated, the brake is heating when the motor is moving. This heat reduces the available thermal budget for the motor.
c. A thermal model is necessary to predict heating for all sources and consider the available thermal budget for each joint. Each joint needs to be highly engineered.
d. In most cases the motor will have to be sized to perform under less than optimal thermal conditions essentially derating the motor from what it could produce.
5. OFF THE SHELF, MODIFIED STANDARD, OR CUSTOM MOTOR SOLUTION
a. Well, everyone wants to use “off the shelf” standard product… right? They are readily available and lower cost…sounds good. Realistically, if you are designing a precision robot to be manufactured in a highly controlled quality system, off the shelf may not be the best solution.
b. Tight control of design and revisions directly conflicts with the “off the shelf” supplier mentality. Buying off the shelf means that the supplier can change whatever they want at any time, especially if there are no industry standards controlling design and interface compatibility. Without control, internal materials, design, or form factor can change without notice. Forcing a supplier to control the design and changes, turns the product into a custom product that is not “off the shelf” any longer.
c. Some low-cost hobby motors from global distributors posing as manufacturers are finding their way into advanced systems. In this case, it is unknown who the actual manufacturer is, and there are no controls in place to guarantee that materials and design will not change on the next delivery.
d. Buy from a reputable supplier with an open book policy allowing factory visits, sub-supplier identification, and customer included change control. At minimum, purchase a modified standard product, where the modifications include control/approval over design revisions.
e. If volumes approach a few hundred units per year, a custom designed solution may be the best option. It gives complete control over the design, materials, and manufacturing process. It will get you to the center of the requirements spectrum in Figure 1 below.

Figure 1 – Design Spectrum for a robot Joint, axes converge on the center
A traditional frameless motor is shown below. The motor shown in Figure 2 is a slotless LS Series motor from ThinGap. These motors have zero cogging and a large through hole. Km of these motors rivals some traditional slotted (or toothed) brushless permanent magnet motors.

Figure 2 – Slotless Frameless Torque Motor Example
Figure 3 below is a compact integrated Robot Joint. It uses a frameless torque motor kit, high resolution medium accuracy absolute encoder on the input. It has a high ration zero backlash precision gear and a high accuracy absolute encoder on its output.
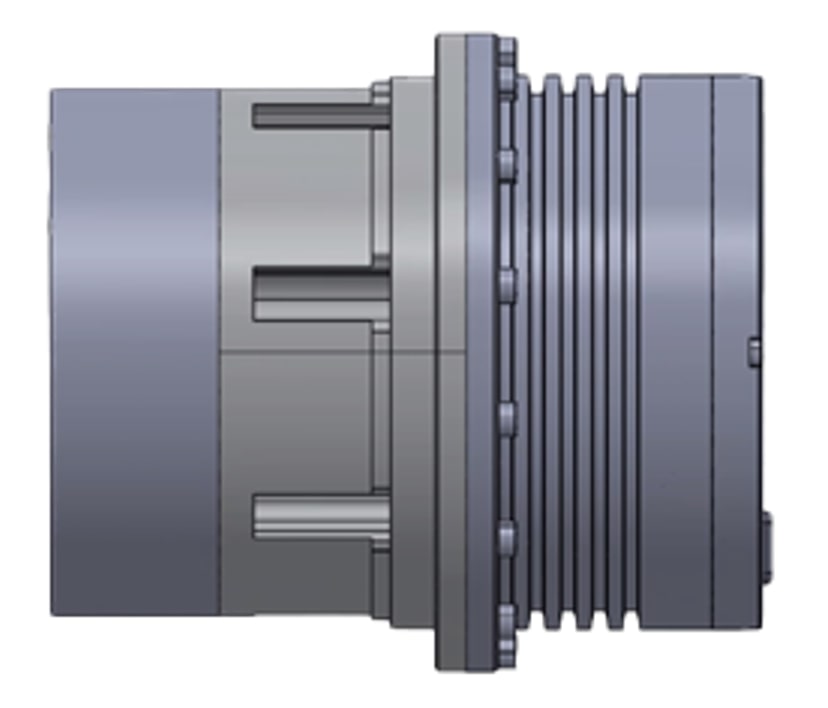
Figure 3 – Highly integrated Robot Joint
Figure 4 below is a Robot Joint with Tradition Servo Motor. It is more than 2X longer for exact same performance. It is also less reliable with more components including a coupling. It has more adjustments and connections than the compact joint above. It does not have a through hole in the shaft.

Figure 4 – Traditional Robot joint with exposed servo motor